Mechatronics Engineer

REHABILITATION ROBOTICS LAB
Research Assistant
Helping disabled people walk again with the help of Robotics. Prototyping hardware and software for the wearable robotic device for rehabilitation purposes.
Responsibilities
-
Working with an embedded system, electromechanical actuators, microcontrollers, sensors, motion controllers, RGB-D cameras, etc.
-
Prototyping for converting a big bulky and stationary experimental setup into a compact, powerful, and versatile system that can be worn on the subject and have similar accuracy and performance.
-
Developing control algorithms for assistive walking for this portable system and integrating environment sensing to adapt to the environment.
-
Conduct experiments for assistive walking using this portable system to confirm the effectiveness and verify the reduction in metabolic cost(effort required for walking).
Experimental setup

Convert bulky and stationary experimental setup into a compact and portable robotics system.
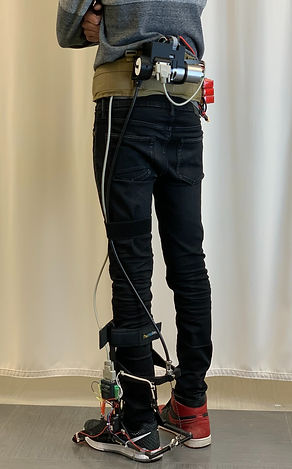
System layout

Accomplishments
-
Build multiple prototypes for this wearable device, improving each iteration.
-
Programmed a walking | running controller to perform state detection and generate torque trajectories/ by utilizing various sensors in the Simulink environment.
-
Deployed the walking controller to embedded pc using TwinCAT development environment.
-
Build web-based HMI for real-time control and data visualization over a wireless network.
-
Successfully build the solution to do environment sensing using an Intel realsense depth camera(RGB-D camera), which identifies the flat terrains and their inclination/declination angle with 0.5-degree accuracy.
-
Used ROS(robot operating system) for environment sensing to take advantage of various open-source libraries, flexibility, and easy development.
-
Performed assistive walking experiments using this prototype and got a more than 10% reduction in metabolic cost
-
Integrated environment sensing into this system to adapt to different terrain and optimize torque trajectories for them. Expecting more reduction in effort compared to one without environment sensing.
Environment Sensing | Plane segment
Plane segmentation using the RANSAC algorithm to get flat terrain in front of the subject.
Environment Sensing | Slope Estimation
comparing plane normal and camera orientation to get an inclination of the terrain.














